
티스토리 뷰
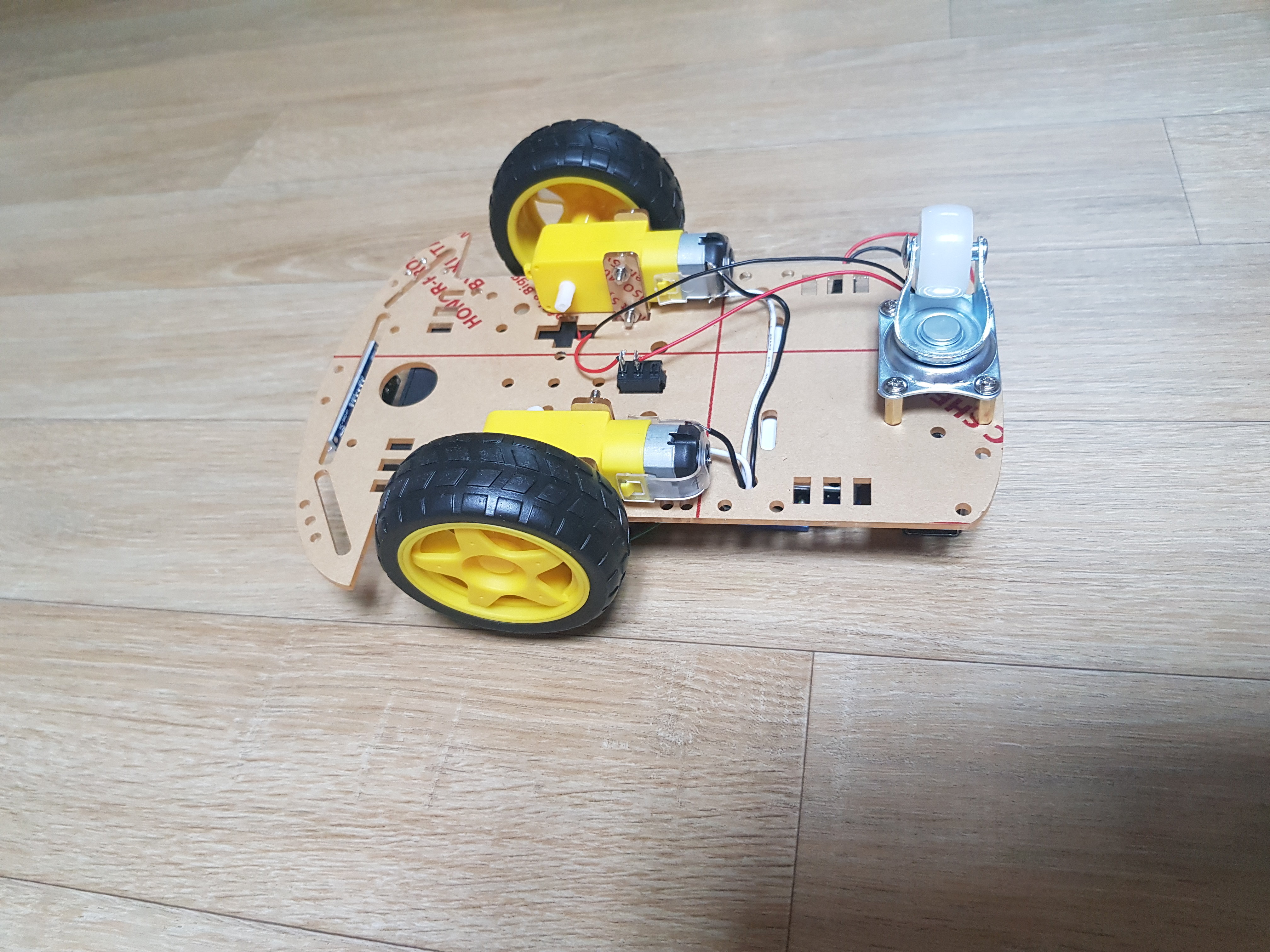
지금까지 테스트했던 2WD 로봇프레임에
각종 부품 위치를 잡아서
고정시켜 보았습니다.
기존 조립된 건전지 홀더 위치가
적절하지 않아서
체결류는 빼버리고
적당히 위치를 옮겨서 글루건으로 붙였습니다.

초음파센서랑 9V 건전지, 아두이노 보드도
글루건으로 대략 고정했습니다.

선정리를 열심히 하지는 않았습니다.;;
초음파 센서로 전방 장애물을 감지해서
5 cm 이내에 장애물이 있으면
정지 - 후진 - 우회전 - 직진
하는 방법으로 코드를 작성했는데,
5 cm 로는 로봇이 달리던 속도에 따라
장애물을 감지하기도 하고
못하기도 했습니다.
그래서 넉넉하게 20 cm 로
장애물 감지거리를 변경하였습니다.
로봇이 달리던 속도에 따라
일정하지 않은 거리를 두고 로봇이 정지합니다.
아래는 2륜 로봇 구동 영상입니다.
정확히 직진을 하지 못하고
오른쪽으로 꺾여서 가네요,
바퀴의 위치가 정확히 고정되어 있지도 않고
모터 속도를 제어하는 것이 아니다 보니
어쩔 수 없는 상황입니다.
간단하지만 오랜만에 로봇을 만들어
기분이 좋습니다.
--------------------------------------------------------------
며칠 후,
센서를 더 붙여서
장애물을 더 잘 감지하도록
하려고 했는데,
로봇 프레임이 금이 가 있습니다.
무척 슬프네요;;

'아두이노' 카테고리의 다른 글
| 아두이노 - 7 세그먼트 (4자리) 모듈 연결 (0) | 2020.12.13 |
|---|---|
| L293D 모터 드라이버 + 초음파 센서 (0) | 2020.06.01 |
| 2WD 프레임 + L293D 모터드라이버 (0) | 2020.05.27 |
| L293D 모터 드라이브 쉴드 DC 모터 구동 (2) | 2020.05.26 |
| 아두이노 - 초음파 센서 (0) | 2020.05.19 |
댓글
공지사항
최근에 올라온 글