
티스토리 뷰
L293D 모터 드라이버 쉴드가
모터를 구동시키기에는 참 편리한데,
센서를 어디에 연결해야 할 지
모르겠습니다.
아래 링크로 가시면
L293D 모터 드라이버 쉴드 회로도를
보실 수 있습니다.
전자부품 전문 쇼핑몰 메카솔루션입니다.
국내 최대 전자부품 쇼핑몰, 아두이노 키트, 라즈베리파이 등 당일발송, 예제 제공, 쇼핑 그 이상을 제공합니다.
mechasolution.com
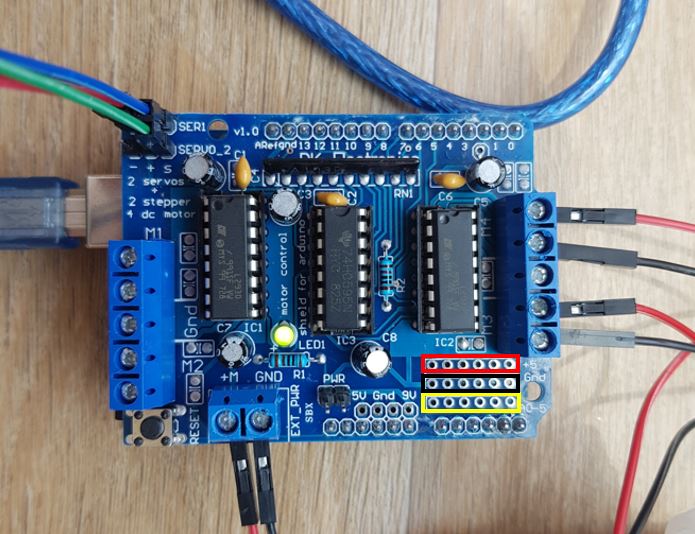
아날로그 신호를 입력시키려면
아래 사진에서 노란색 표시한 곳에
Analog input A0~A5 이
연결되어 있으니
이 곳을 사용하면 됩니다.
또한, 붉은색 표시한 곳은 VCC,
검정색 표시한 곳은 GND와 연결되어 있으니
센서 전원으로 사용 가능해 보입니다.
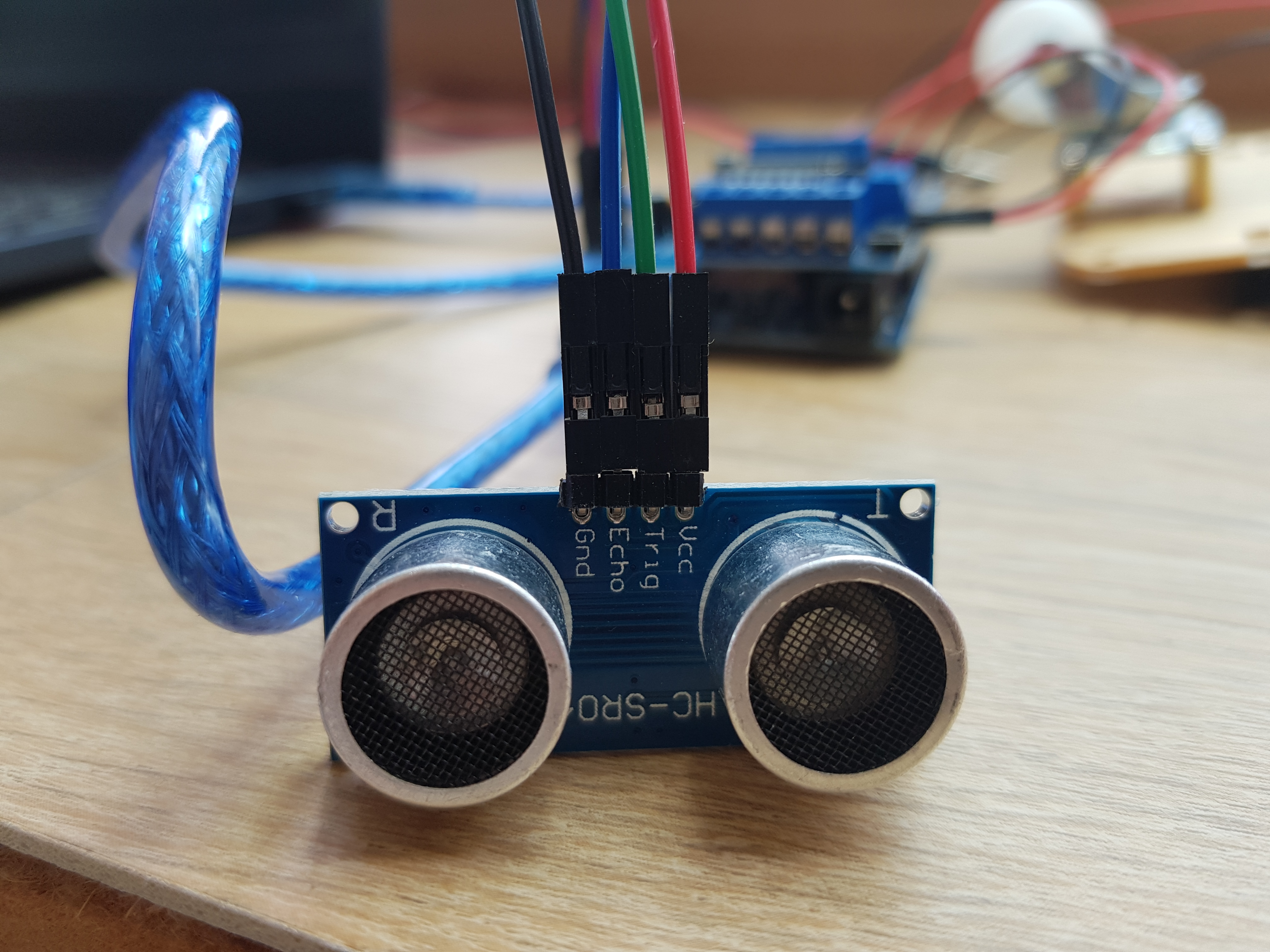
저는 초음파센서를 연결하려는데
초음파센서는 아날로그 입력핀은 필요없고
디지털 입/출력핀만 연결하면 됩니다.
그런데 아두이노 보드를
L293D 모터 드라이버 쉴드가 막고 있으니
어떻게 디저털핀을 사용해야 할 지
약간 막막했습니다.
그래서 궁여지책으로,,
(분명히 더 좋은 방법이 있을 것 같습니다.)
서보모터 구동을 위해
마련해둔 핀을 이용하기로 했습니다.
(아래 그림 붉은색 박스 부분)
L293D 모터 드라이버 쉴드 회로도 상
Servo1, Servo2 모터 구동을 위해
아두이노 9번핀과 10번핀의 PWM을
사용하게 되어있는데
저는 9번핀을 초음파센서 trig 핀으로
10번핀을 초음파센서 echo 핀으로
사용하기로 하였습니다.

녹색 점퍼선은 trig, 파란색 점퍼선은 echo 입니다.
VCC 붉은색, GND 검정색 점퍼선도
서보모터 구동용 핀과 연결하였습니다.
여기에 지난번 만들었던
2WD 로봇 프레임 모터를 연결시켰습니다.
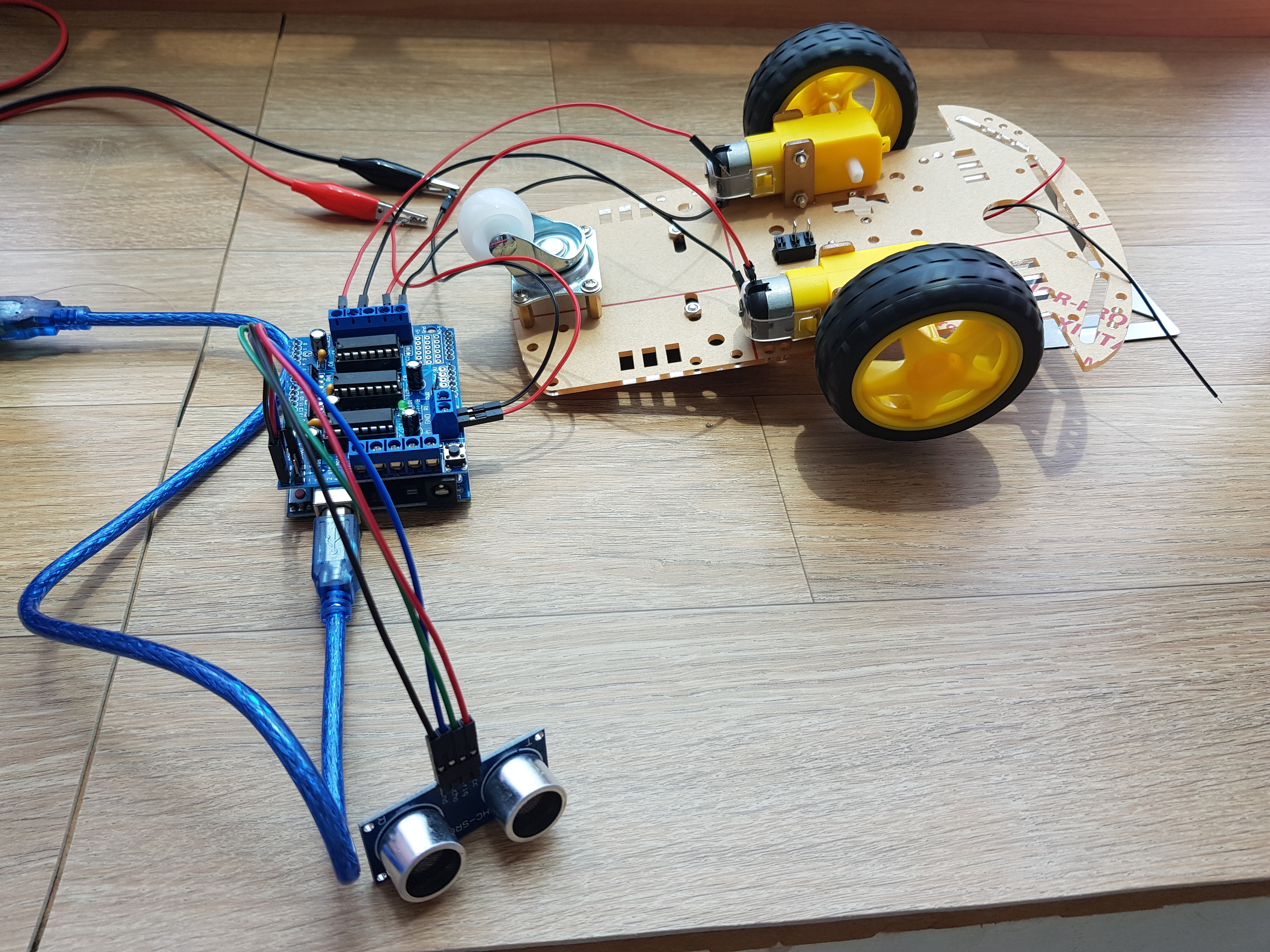
프로그램은
초음파 센서에 장애물이 감지되지 않으면
2개 모터 정회전,
장애물이 감지되면
2개 모터 역회전 후
2개의 모터를 서로 반대로 회전시키도록
스케치를 작성하였습니다.


초음파 센서 구동 사용이나
L293D로 모터 구동에 대한 내용은
이전 게시글 참고해 주세요.
초음파센서 앞에 장애물이 없는 경우
바퀴 두 개가 전진하는 방향으로 바퀴가 돌아가며,
초음파센서 앞애 장애물이 있는 경우
(손으로 장애물을 감지시킨 경우)
바퀴 두 개가 잠시 섰다가
서로 반대방향으로 돌아갑니다.
다시 초음파센서 앞에 장애물이 없어지면
(손을 치우면)
바퀴 두 개가 전진하는 방향으로 바퀴가 돌아갑니다.
이상, 초음파센서와 L293D 모터 드라이버
연결 테스트였습니다.
'아두이노' 카테고리의 다른 글
| 아두이노 - 7 세그먼트 (4자리) 모듈 연결 (0) | 2020.12.13 |
|---|---|
| 초음파센서 장착 2륜 로봇 (0) | 2020.06.07 |
| 2WD 프레임 + L293D 모터드라이버 (0) | 2020.05.27 |
| L293D 모터 드라이브 쉴드 DC 모터 구동 (2) | 2020.05.26 |
| 아두이노 - 초음파 센서 (0) | 2020.05.19 |